Toric steady states
Jump to navigation
Jump to search
A mass action system is said to have toric steady states if the steady state ideal is generated by binomials.
Complex balanced systems
It was shown by Craciun et al.[1] that every complex balanced mass action system has toric steady states. In particular, we have that the steady state ideal is generated by the binomials
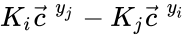
where (corresponding to the linkage classes).
 (corresponding to the
(corresponding to the References
- ↑ Gheorghe Craciun, Alicia Dickenstein, Anne Shiu, and Bernd Sturmfels, Toric dynamical systems, J. Symbolic Comput., 44(11):1551–1565, 2009